对 RNN 系成员的一些总结。
RNN
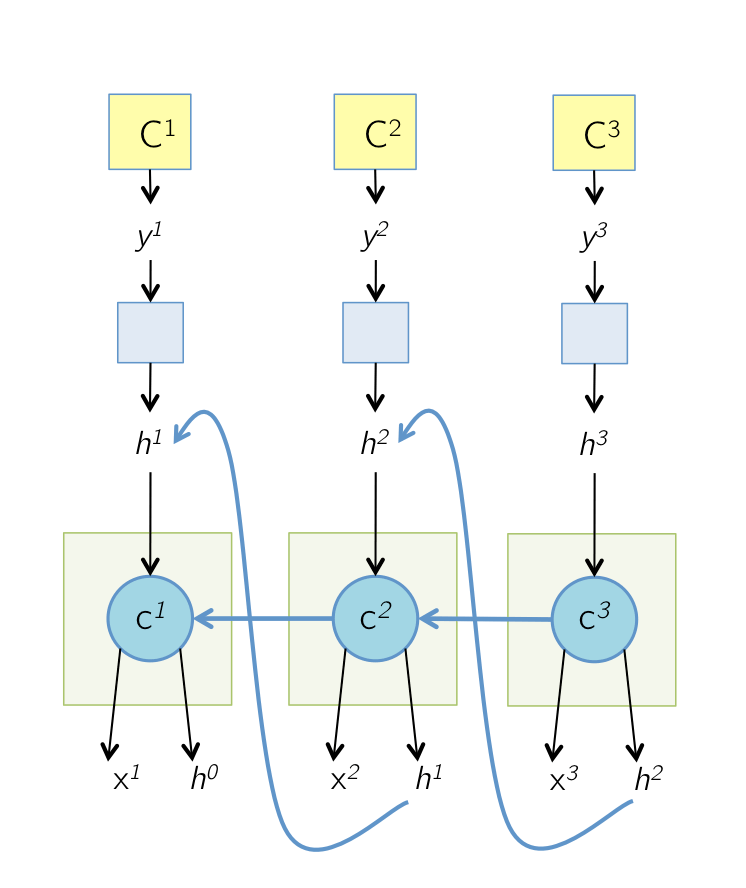
这是一个三维低等生物眼里的 RNN:
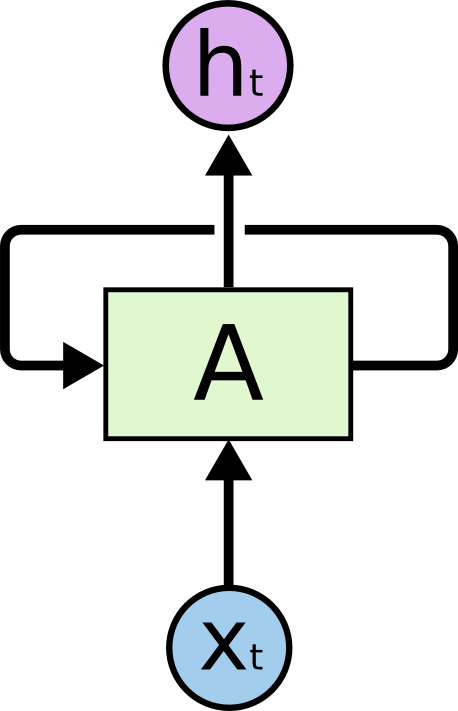
这个细胞(绿色的框)相当于 Keras 中一层 RNN 的隐藏层,一个隐藏层可能有多个神经元。它在 t 时刻的状态(隐状态)叫做 ht,是一个向量,向量维数与这个隐藏层的神经元数量相等,每个神经元的值都是一个标量。
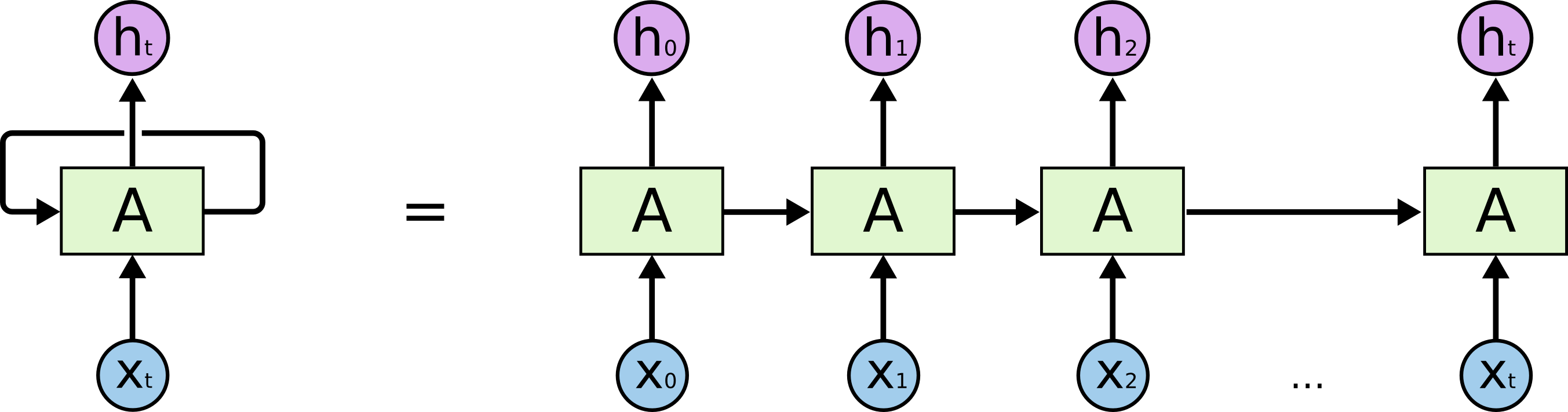
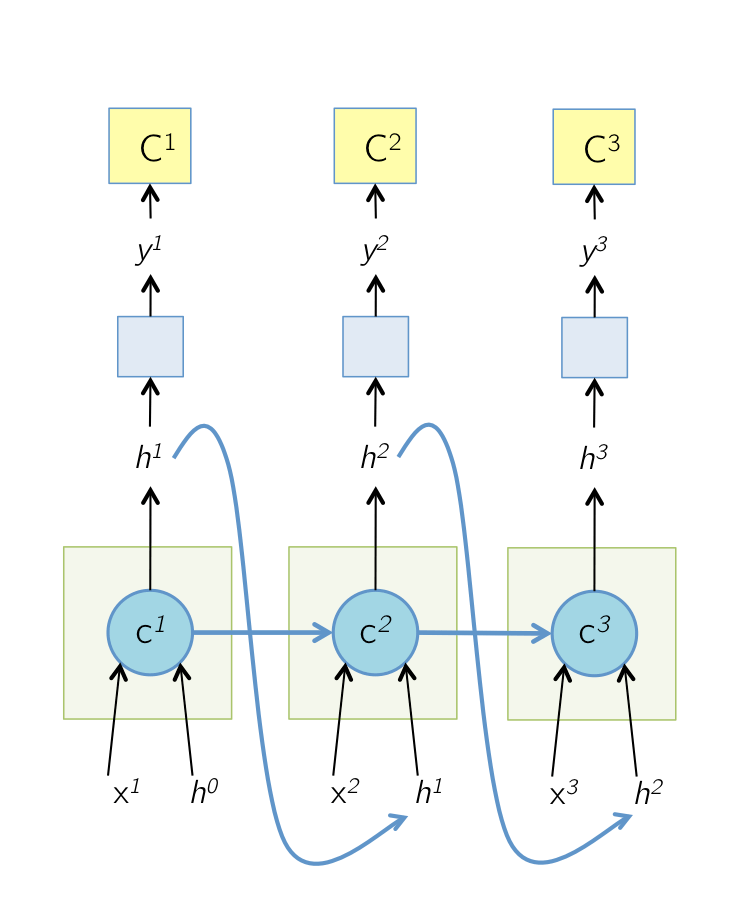
这是一个四维高等生物眼里的 RNN(按时间步展开):
如果画得详细一点:
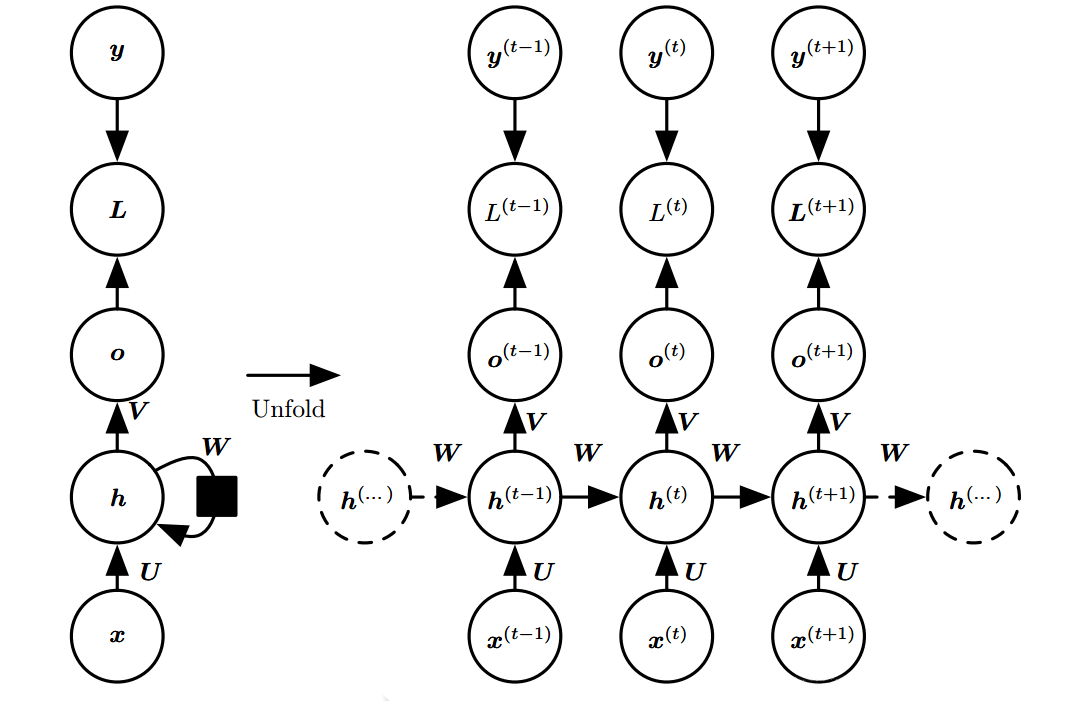
其中:
- xt:t 时刻的输入向量;
- ht:t 时刻的隐状态;
- ot:t 时刻的输出(只由 ht 决定);
- Lt:t 时刻的损失函数,最终的损失函数是 ∑tLt;
- yt:t 时刻的真实结果(ground truth);
- Wx,Wh,Wo:权重矩阵,要学习的参数,在所有时间步中都是共享的;
上一个时间步的隐状态 ht−1 会在 t 时刻乘一个权重矩阵 Wh 然后重新输入细胞,也就是 ht 同时依赖于 xt 和 ht−1。
前向传播
符号说明:
- f(⋅),g(⋅):激活函数;
- b:偏置向量(bias);
- y^t:模型在 t 时刻的最终输出;
公式:
ht=f(Wxxt+Whht−1+bh)
ot=Woht+bo
y^t=g(ot)
损失函数 Lt 的作用就是量化模型在当前位置的损失,即 y^t 和 yt 的差距。
反向传播
整体损失函数:
L=t∑nLt
有参数 Wx,Wo,Wh,bo,bh,先对它们随机初始化,然后在每个迭代周期对各参数求梯度,并按梯度的方向更新这些参数以使 L 最小化:
Wt+1=Wt−r⋅∂W∂L∣W:Wt,r>0
其中 r 是学习率,∂W∂L 是损失函数在 W=Wt 位置的偏导数,即梯度。
Wo,bo 没有长期依赖,所以偏导好求一些:
∂Wo∂L=t=1∑n∂Wo∂Lt=t=1∑n(y^t−yt)(ht)T(=t=1∑n∂ot∂Lt⋅∂Wo∂ot)
∂bo∂L=t=1∑n∂bo∂Lt=t=1∑ny^t−yt
而正向传播中,ht 对 ht+1 还有贡献,所以反向传播计算 Wx,Wh 在 t 时刻的梯度时,还需要考虑 t+1 时刻的梯度(全导数)。
先求 t 时刻隐状态的梯度:
然后 Wh,Wx,bo 的梯度为:
∂Wh∂L=t=1∑ndiag(1−ht2)∂ht∂Lht−1T
∂Wx∂L=t=1∑ndiag(1−ht2)∂ht∂LxtT
∂bo∂L=t=1∑ndiag(1−ht2)∂ht∂L
梯度消失和爆炸
如果直接把 Wh 在 t 时刻的偏导式展开:
∂Wh∂Lt=∂ot∂Lt∂ht∂ot∂Wh∂ht+∂ot∂Lt∂ht∂ot∂ht−1∂ht∂Wh∂ht−1+...+∂ot∂Lt∂ht∂ot∂ht−1∂ht∂ht−2∂ht−1...∂h1∂h2∂Wh∂h1=
k=0∑t∂ot∂Lt∂ht∂ot(j=k+1∏t∂hj−1∂hj)∂Wh∂hk
同理,Wx 在 t 时刻的偏导式展开为:
∂Wx∂Lt=k=0∑t∂ot∂Lt∂ht∂ot(j=k+1∏t∂hj−1∂hj)∂Wx∂hk
h 通过激活函数得到,假设激活函数为 tanh:
hj=tanh(WxWj+Whhj−1+bh)
j=k+1∏t∂hj−1∂hj=j=k+1∏t∂hj−1∂hjtanh′Wh
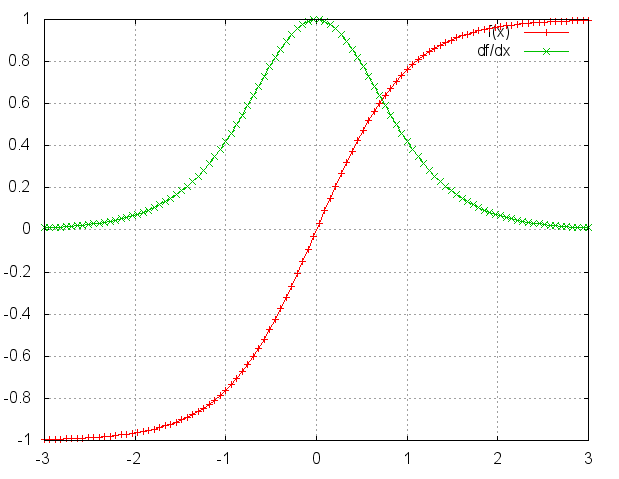
tanh 函数的函数图像和导数图像为:
假设激活函数为 sigmoid:
j=k+1∏t∂hj−1∂hj=j=k+1∏t∂hj−1∂hjσ′Wh
sigmoid 函数的函数图像和导数图像为:
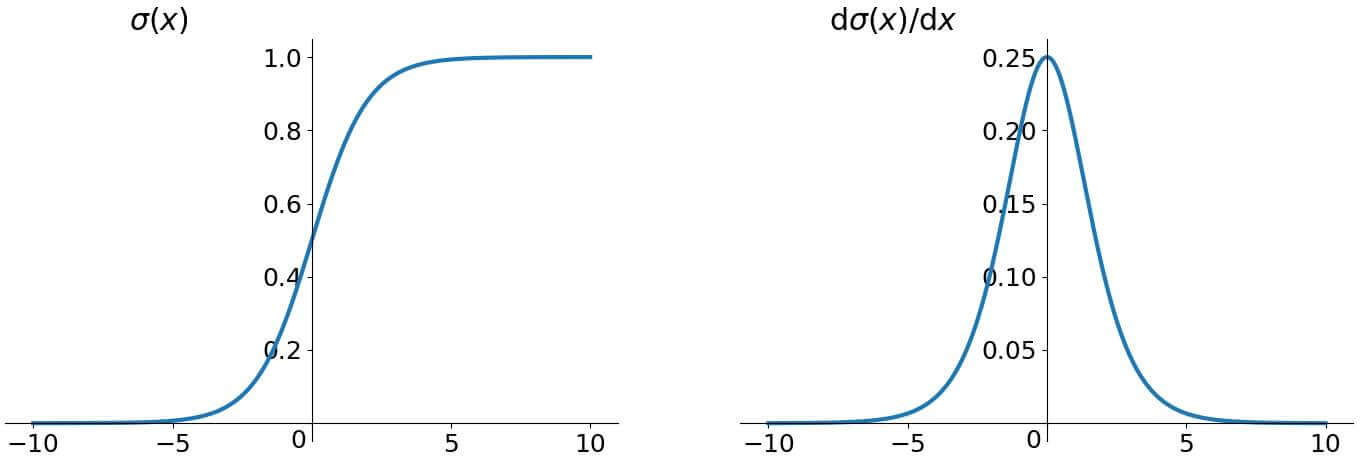
梯度消失:
可以看到,这俩函数的导数范围都不会超过 1,如果 Wh 的初始化值也在 [0,1] 之间,那么就是一堆 [0,1] 之间的小数在连乘,乘到最后就会导致梯度越来越接近于 0,造成梯度消失。
在 DNN 中,某一层的梯度消失就意味着那一层的参数再也不更新,那一层的隐层就变成了单纯的映射层。
而 RNN 中,梯度是累加的,就算较远时刻的梯度趋近于 0,累加后的整体梯度依然不会为 0,整体梯度是不会消失的。但这会造成 RNN 被近距离梯度主导,只能利用的有限的历史数据,难以学到远距离的依赖关系。
但相比 sigmoid,tanh 函数的梯度还是更大一点,所以收敛速度要快一些,且引起梯度消失更慢。
而解决梯度消失可以靠换激活函数(ReLU、LeakyReLU、ELU 等)或改传播结构(LSTM、Batch Normalization、ResNet 残差结构)。
如,ReLU 激活函数的函数图像和导数图像为:
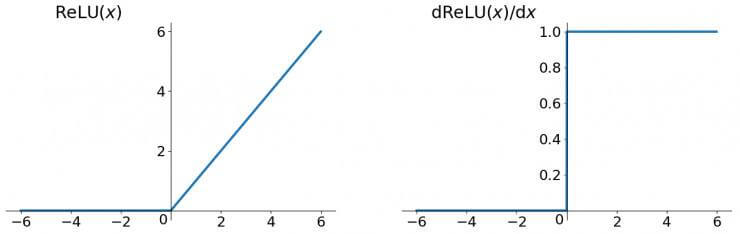
因为 y 轴右侧导数恒为 1,所以避免了梯度消失的问题。但恒为 1 的导数容易导致梯度爆炸,所以需要一些调参技巧,比如给梯度设定合适的阈值,如果大于这个阈值,就按这个阈值进行更新。
梯度爆炸:
而如果 Wh 的初始化值非常大,那连乘起来就会梯度爆炸。梯度爆炸意味着可能因为过大的优化幅度而跨过最优解,导致前面的学习过程白费。
LSTM
Long Short-Term Memory. Sepp Hochreiter and Jürgen Schmidhuber. Neural Computation 1997. [Paper]
一般来说应该放一张这样的图:
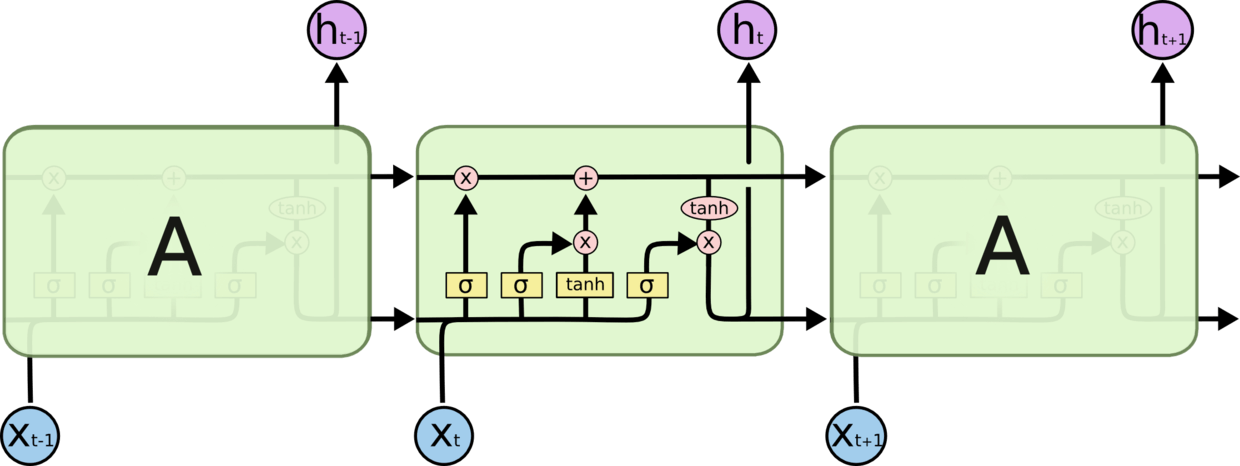
同样,这个细胞相当于 Keras 中一层 LSTM 的隐藏层,隐藏层里有四个前馈网络层。图里的 4 个黄色框每个都是一个前馈网络层,它们的激活函数分别为 sigmoid(1,2,4)和 tanh(3)。
Hidden Units(Keras 的 units)就是每个前馈网络层的神经元个数。
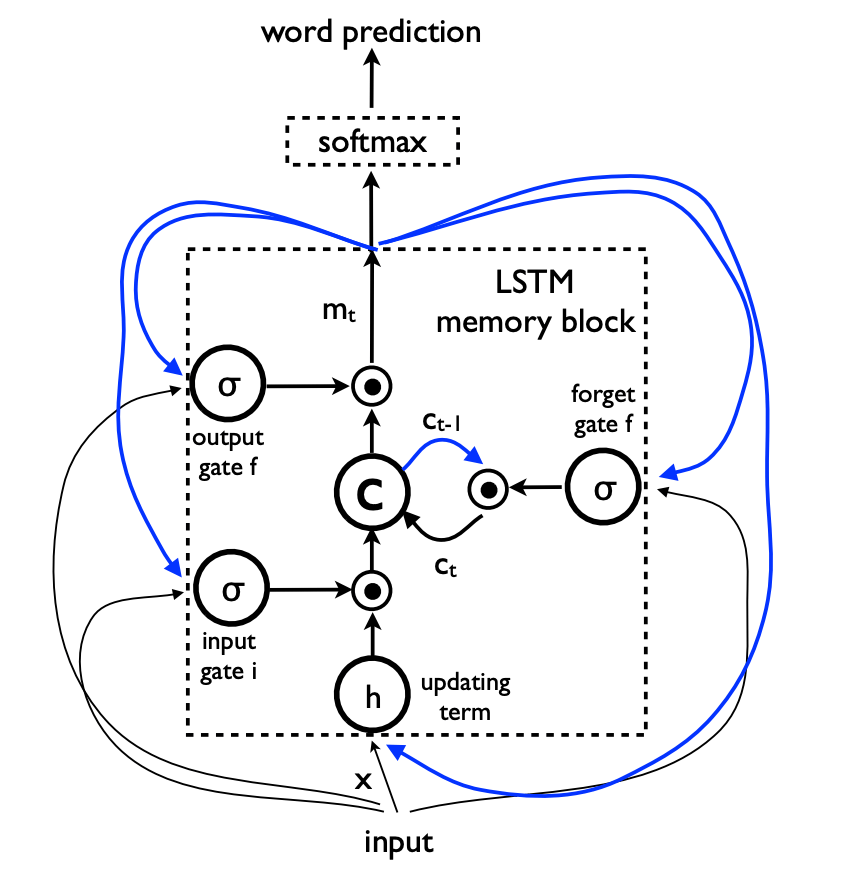
另一种画法(论文 Show and Tell),虽然它似乎把 output gate o 写成了 output gate f(…):
LSTM 的核心是一个由 3 个门控制的记忆细胞 c。t−1 时的隐状态 ht−1 会被用于当前细胞状态的损失计算,和下一细胞状态(t 时)的隐状态 ht 的计算,所以 ht−1 会在 t 时经过这 3 个门重新进入细胞。
前向传播
传播流程:
后面公式中的符号说明:
- σ(⋅):sigmoid 激活函数,会把矩阵转换为一个介于 0 和 1 之间的值作为门控信号,0 表示完全遗忘,1 表示完全接受;
- tanh(⋅):tanh 激活函数,会把矩阵转换为一个介于 -1 和 1 之间的值;
- ⊙:哈达玛积(Hadamard Product),即俩矩阵对应元素相乘,所以要求俩矩阵同形
遗忘门
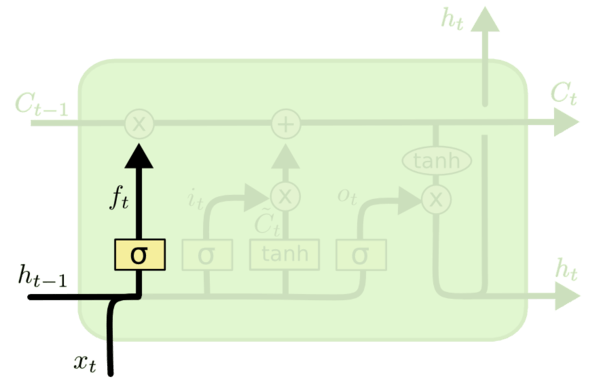
Forget Gate,对上一个细胞状态传进来的信息进行选择性遗忘。会根据 ht−1 和 xt 来为上一个细胞状态 ct−1 计算一个门控信号,计算公式为:
ft=σ(Wfxxt+Wfhht−1+bf)
然后把 ft 跟 ct−1 相乘,就是最终从上一个状态输入的内容:
ft⊙ct−1
输入门
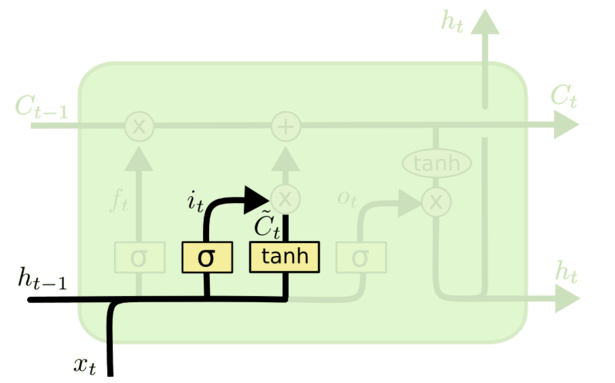
Input Gate,对现阶段输入 xt 进行选择性记忆,更新细胞状态。由两个部分构成:
这俩相乘后的结果就是最终被记下来的现阶段新学到的东西,再加上从上一个细胞状态输入的内容就是更新后的细胞状态。所以细胞状态的更新公式为:
ct=ft⊙ct−1+it⊙c~t
输出门
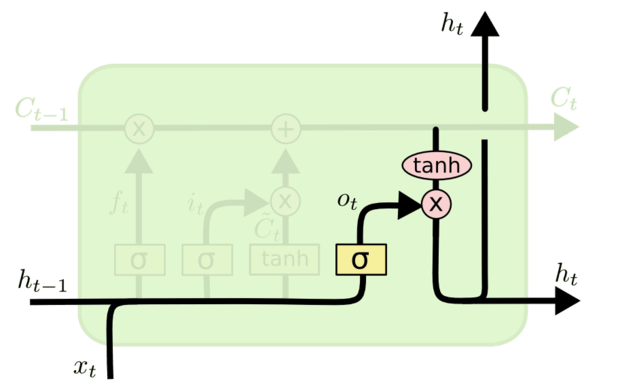
Output Gate,现在细胞状态已经更新了,所以要决定那些状态最终会被输出(隐状态 ht)。依然用 sigmoid 激活函数来计算一个门控信号,控制要输出哪些内容:
ot=σ(Woxxt+Wohht−1+bo)
然后把它跟用 tanh 激活函数放缩过的当前细胞状态 ct 相乘,就是这个阶段最终输出的隐状态:
ht=ot⊙tanh(ct)
最终输出
最终的输出 yt 会由 ht 变换得到,常见的做法大概是把 ht 扔进 softmax:
yt=softmax(ht)
反向传播
传播流程:
公式以后再说,我已经跑偏太多了…
GRU
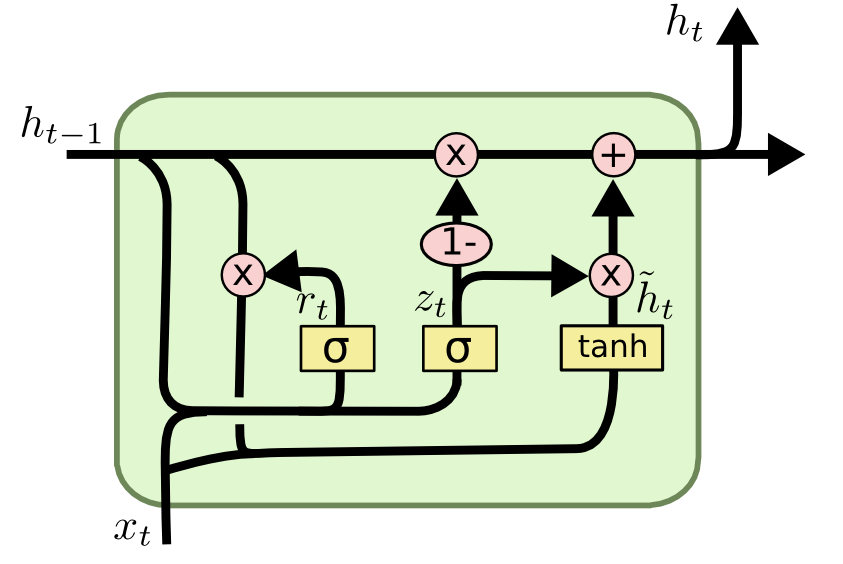
GRU 是 LSTM 的变体。它只有两个门,重置门 rt 和更新门 zt(用一个门达到了遗忘和输入的目的)。它还合并了隐状态和细胞状态。它的模型结构比 LSTM 简单,但同时能达到跟 LSTM 相当的效果。
重置门
Reset Gate,先计算重置门控信号 rt,用于控制要保留上一个时刻的多少信息:
rt=σ(Wrxxt+Wrhht−1+br)
然后计算当前时刻的候选隐状态(candidate hidden state):
h^t=tanh(Whxxt+rt⊙(Whhht−1)+bh)
相当于 h^t 主要包含了当前输入 xt 的信息,然后有选择性的加入上一时刻的信息(ht−1)。
更新门
Update Gate,先计算更新门控信号 zt,用于控制要从 ht−1 中遗忘多少信息和要从 h^t 中记忆多少信息:
zt=σ(Wzxxt+Wzhht−1+bz)
然后直接算出当前时刻隐状态 ht:
ht=(1−zt)⊙ht−1+zt⊙h^t
可以理解为 (1−zt) 对标 LSTM 中的遗忘门控,zt 对标 LSTM 中的输入门控。
Reference